Abstract
This paper addresses the task of modeling Deformable Linear Objects (DLOs), such as ropes and cables, during dynamic motion over long time horizons. This task presents significant challenges due to the complex dynamics of DLOs. To address these challenges, this paper proposes differentiable Discrete Elastic Rods For deformable linear Objects with Real-time Modeling (DEFORM), a novel framework that combines a differentiable physics-based model with a learning framework to model DLOs accurately and in real-time. The performance of DEFORM is evaluated in an experimental setup involving two industrial robots and a variety of sensors. A comprehensive series of experiments demonstrate the efficacy of DEFORM in terms of accuracy, computational speed, and generalizability when compared to state-of-the-art alternatives. To further demonstrate the utility of DEFORM, this paper integrates it into a perception pipeline and illustrates its superior performance when compared to the state-of-the-art methods while tracking a DLO even in the presence of occlusions. Finally, this paper illustrates the superior performance of DEFORM when compared to state-of-the-art methods when it is applied to perform autonomous planning and control of DLOs.
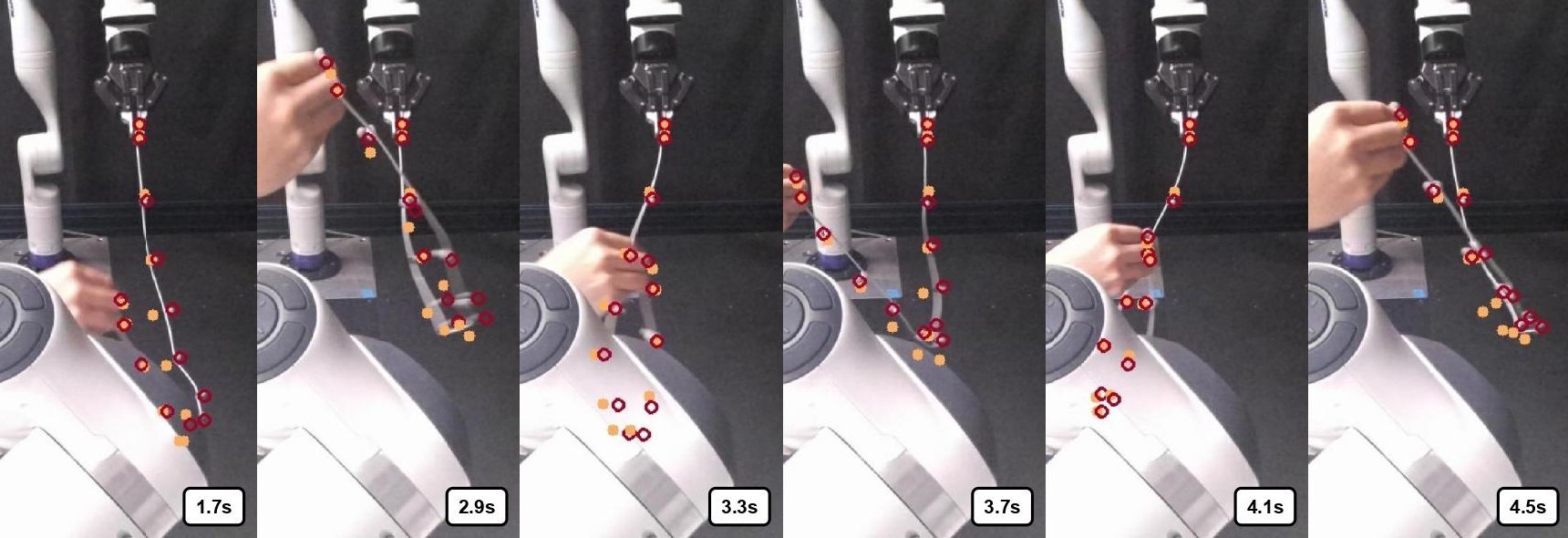
The figure shows DEFORM’s predicted states (yellow) and the actual states (red) for a DLO over 4.5 seconds at 100 Hz. Note that the prediction is performed recursively, without requiring access to ground truth or perception during the process.
Method
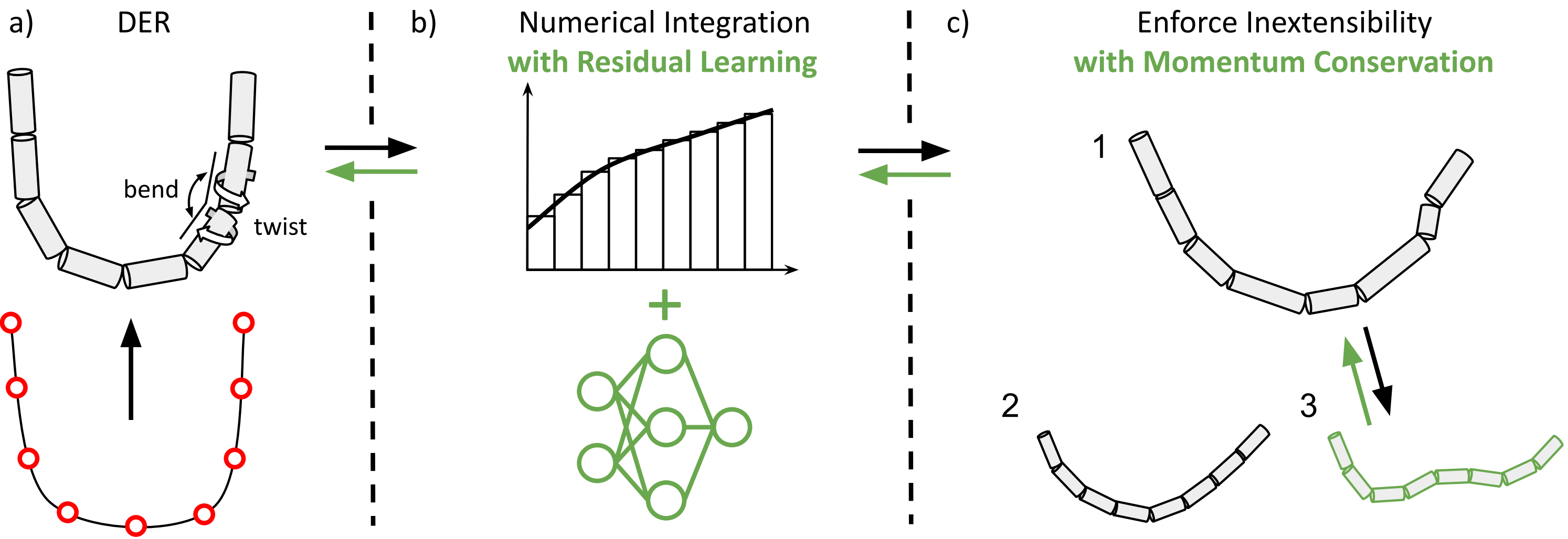
DEFORM introduces a novel differentiable simulator as a physics prior for physics-informed learning to model DLOs in the real world. The following figure demonstrates the overview of DEFORM. Contributions of DEFORM are highlighted in green. a) DER models discretize DLOs into vertices, segment them into elastic rods, and model their dynamic propagation. DEFORM reformulates Discrete Elastic Rods(DER) into Differentiable DER (DDER) which describes how to compute gradients from the prediction loss, enabling efficient system identification and incorporation into deep learning pipelines. b) To compensate for the error from DER’s numerical integration, DEFORM introduces residual learning via DNNs. c) 1 → 2: DER enforces inextensibility, but this does not satisfy classical conservation principles. 1 → 3: DEFORM enforces inextensibility with momentum conservation, which allows dynamic modeling while maintaining simulation stability.
Dataset
For each DLO, we collect 350 seconds of dynamic trajectory data in the real-world using the motion capture system at a frequency of 100 Hz. For dataset usage, please refer to train_DEFORM.py in here.
Demo Video
Citation
This project was developed in Robotics and Optimization for Analysis of Human Motion (ROAHM) Lab at University of Michigan - Ann Arbor.
@article{chen2024differentiable,
title={Differentiable discrete elastic rods for real-time modeling of deformable linear objects},
author={Chen, Yizhou and Zhang, Yiting and Brei, Zachary and Zhang, Tiancheng and Chen, Yuzhen and Wu, Julie and Vasudevan, Ram},
journal={arXiv preprint arXiv:2406.05931},
year={2024}
}