Abstract
Autonomous wire harness assembly requires robots to manipulate complex branched cables with high precision and reliability. A key challenge in automating this process is predicting how these flexible and branched structures behave under manipulation. Without accurate predictions, it is difficult for robots to reliably plan or execute assembly operations. While existing research has made progress in modeling single-threaded Deformable Linear Objects (DLOs), extending these approaches to Branched Deformable Linear Objects (BDLOs) presents fundamental challenges. The junction points in BDLOs create complex force interactions and strain propagation patterns that cannot be adequately captured by simply connecting multiple single-DLO models. To address these challenges, this paper presents Differentiable discrete branched Elastic rods for modeling Furcated DLOs in real-Time (DEFT), a novel framework that combines a differentiable physics-based model with a learning framework to: 1) accurately model BDLO dynamics, including dynamic propagation at junction points and grasping in the middle of a BDLO, 2) achieve efficient computation for real-time inference, and 3) enable planning to demonstrate dexterous BDLO manipulation. A comprehensive series of real-world experiments demonstrates DEFT’s efficacy in terms of accuracy, computational speed, and generalizability compared to state-of-the-art alternatives.
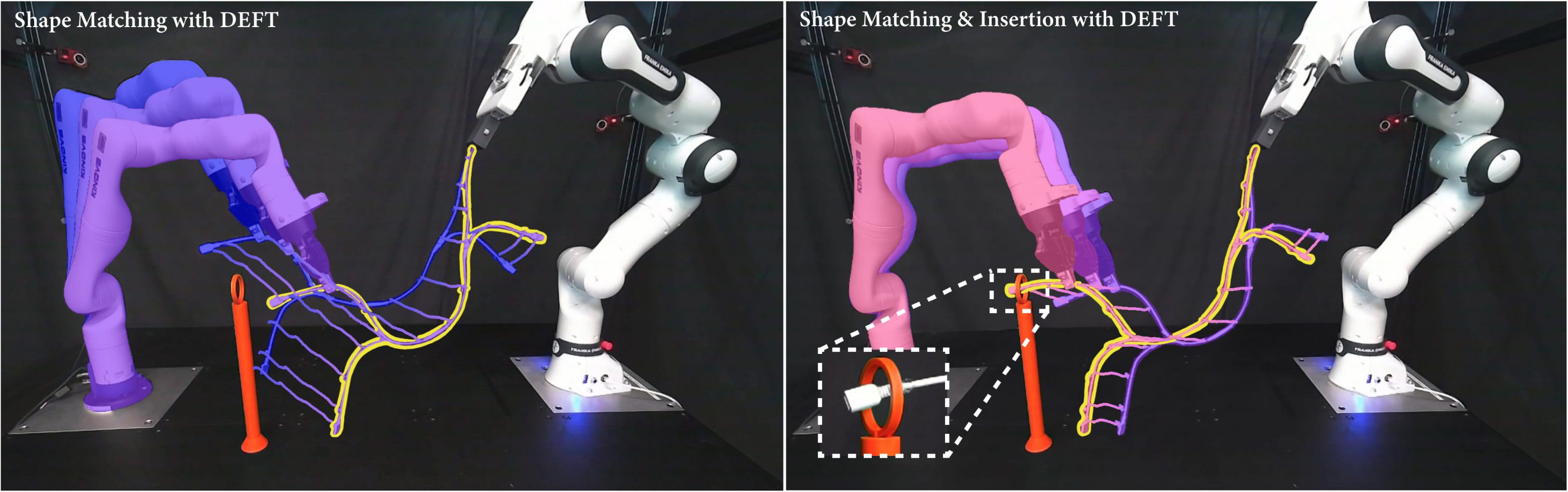
The figures above illustrate how DEFT can be used to autonomously perform a wire insertion task. Left: The system first plans a shape-matching motion, transitioning the BDLO from its initial configuration to the target shape (contoured with yellow), which serves as an intermediate waypoint. Right: Starting from the intermediate configuration, the system performs thread insertion, guiding the BDLO into the target hole while also matching the target shape. Notably, DEFT predicts the shape of the wire recursively without relying on ground truth or perception data at any point in the process.
Method
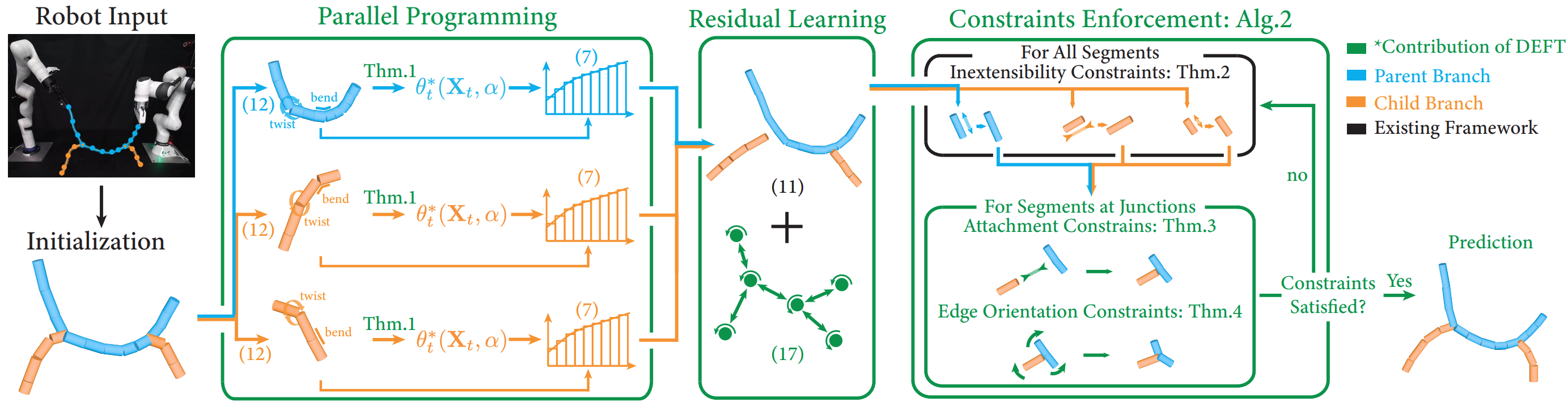
Algorithm Overview of DEFT. In the initialization stage, DEFT begins by separating the BDLO into a parent DLO and one or more children DLOs. Each DLO is discretized into vertices and represented as elastic rods. This setup allows DEFT to capture the geometric and physical properties required for dynamic simulation. To improve computational efficiency, DEFT then predicts the dynamics of each branch in parallel. During this process, analytical gradients are provided to minimize potential energy, ensuring efficient and stable convergence. Next, to address numerical errors, DEFT employs a GNN designed to learn the BDLO’s residual dynamics. By modeling discrepancies between simulated and observed behavior, the GNN refines predictions and enhances overall accuracy. After integration, DEFT enforces constraints to enforce physical realism. Inextensibility constraints are applied to each branch, while junction-level constraints ensure proper attachment at branch junctions. Additionally, edge orientation constraints enable the propagation of dynamics across these junctions. Throughout the entire pipeline, all components remain fully differentiable, allowing for efficient parameter learning from real-world data.
Dataset
- For each BDLO, dynamic trajectory data is captured in real-world settings using a motion capture system operating at 100 Hz when robots grasp the BDLO’s ends. For details on dataset usage, please refer to DEFT_train.py.
- For BDLO 1 and BDLO 3, we record dynamic trajectory data when one robot grasps the middle of the BDLO while the other robot grasps one of its ends.
Modeling Results Visualization
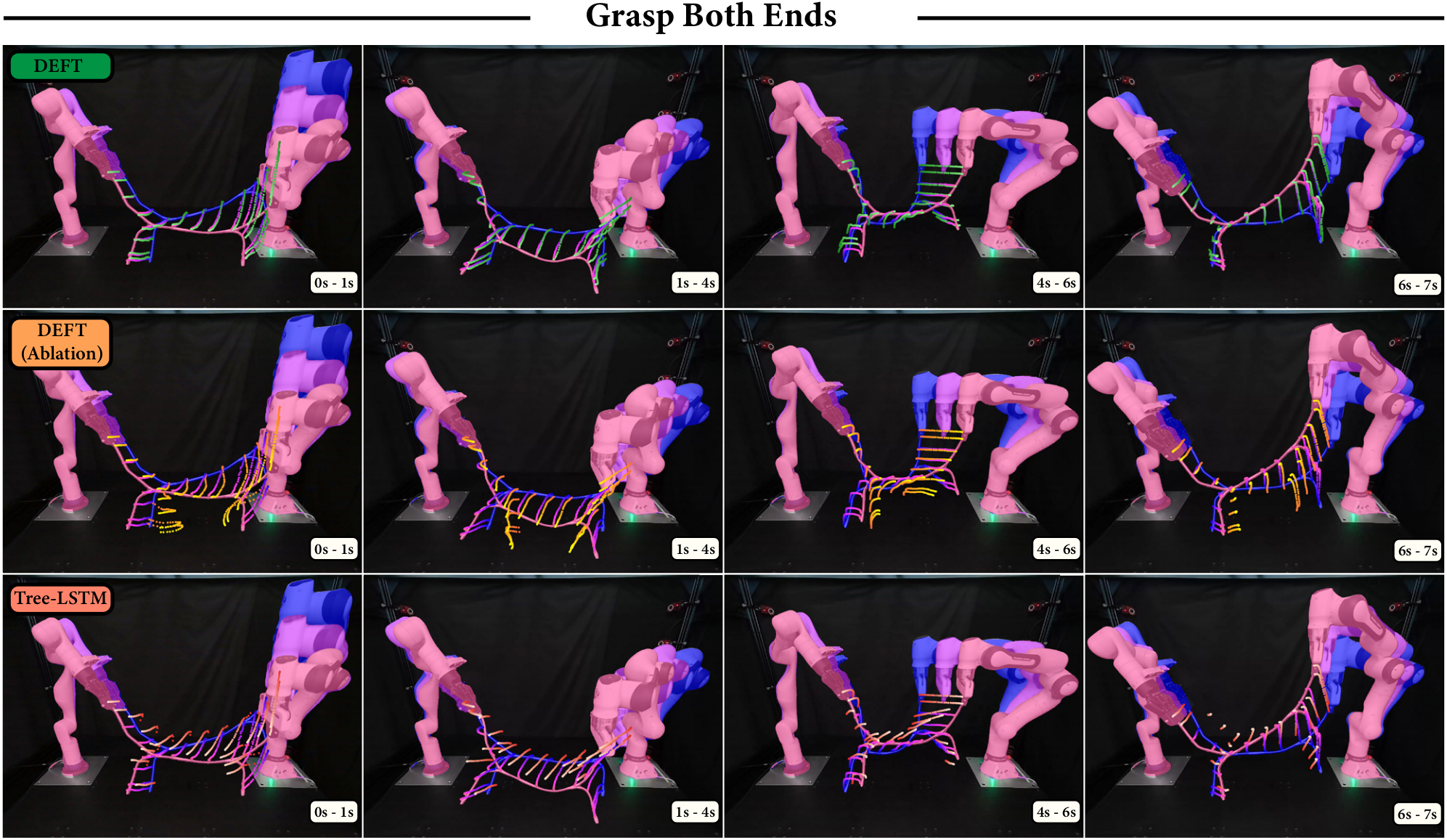
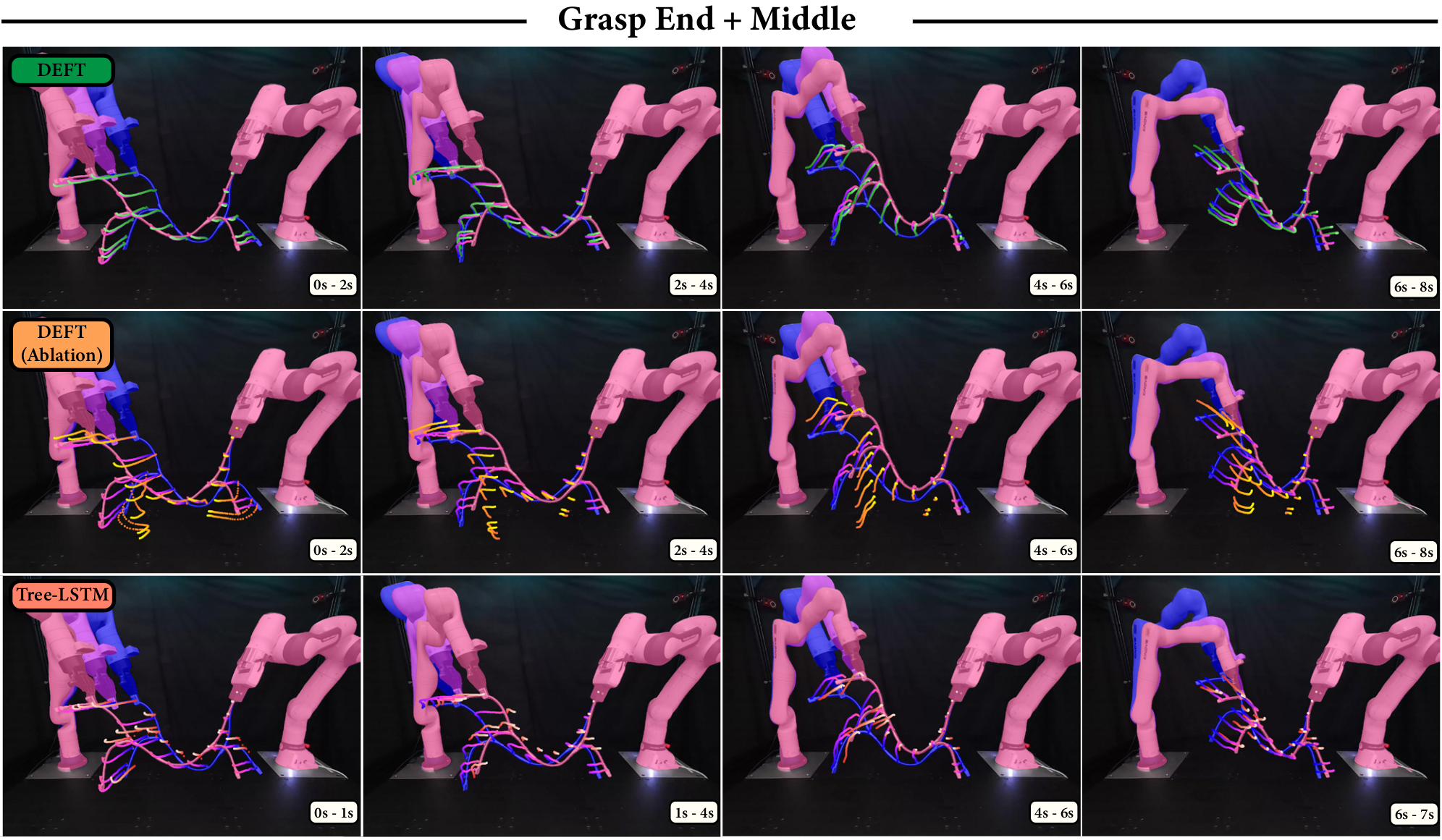
Visualization of the predicted trajectories for BDLO 1 under two manipulation scenarios, using DEFT, a DEFT ablation that leaves out the constraint described in Theorem 4, and Tree-LSTM. The ground-truth initial position of the vertices are colored in blue, the ground-truth final position of the vertices are colored in pink, and the gradient between these two colors is used to denote the ground truth location over time. The predicted vertices are colored as green circles (DEFT), orange circles (DEFT ablation), and light red circles (Tree-LSTM), respectively. A gradient is used for these predictions to depict the evolution of time, starting from dark and going to light. Note that the ground truth is only provided at t=0s and prediction is constructed until t=8s. The prediction is performed recursively, without requiring additional ground-truth data or perception inputs throughout the entire process.
Demo Video
Citation
This project was developed in Robotics and Optimization for Analysis of Human Motion (ROAHM) Lab at University of Michigan - Ann Arbor.
@article{chen2025deft,
title={DEFT: Differentiable Branched Discrete Elastic Rods for Modeling Furcated DLOs in Real-Time},
author={Chen, Yizhou and Wu, Xiaoyue and Zong, Yeheng and Chen, Yuzhen and Li, Anran and Zhang, Bohao and Vasudevan, Ram},
journal={arXiv preprint arXiv:2502.15037},
year={2025}
}