Overview Videos #
CROWS performing trajectory planning between two bookshelfs
Abstract #
Safe motion planning algorithms are necessary for deploying autonomous robots in unstructured environments. Motion plans must be safe to ensure that the robot does not harm humans or damage any nearby objects. Generating these motion plans in real-time is also important to ensure that the robot can adapt to sudden changes in its environment. Many trajectory optimization methods introduce heuristics that balance safety and real-time performance, potentially increasing the risk of the robot colliding with its environment. This paper addresses this challenge by proposing Conformalized Reachable Sets for Obstacle Avoidance With Spheres (CROWS). CROWS is a novel real-time, receding-horizon trajectory planner that generates probalistically-safe motion plans. Offline, CROWS learns a novel neural network-based representation of a spherebased reachable set that overapproximates the swept volume of the robot’s motion. CROWS then uses conformal prediction to compute a confidence bound that provides a probabilistic safety guarantee on the learned reachable set. At runtime, CROWS performs trajectory optimization to select a trajectory that is probabilstically-guaranteed to be collision-free. We demonstrate that CROWS outperforms a variety of state-of-the-art methods in solving challenging motion planning tasks in cluttered environments while remaining collision-free. Code, data, and video demonstrations can be found at roahmlab/crows.
Method #
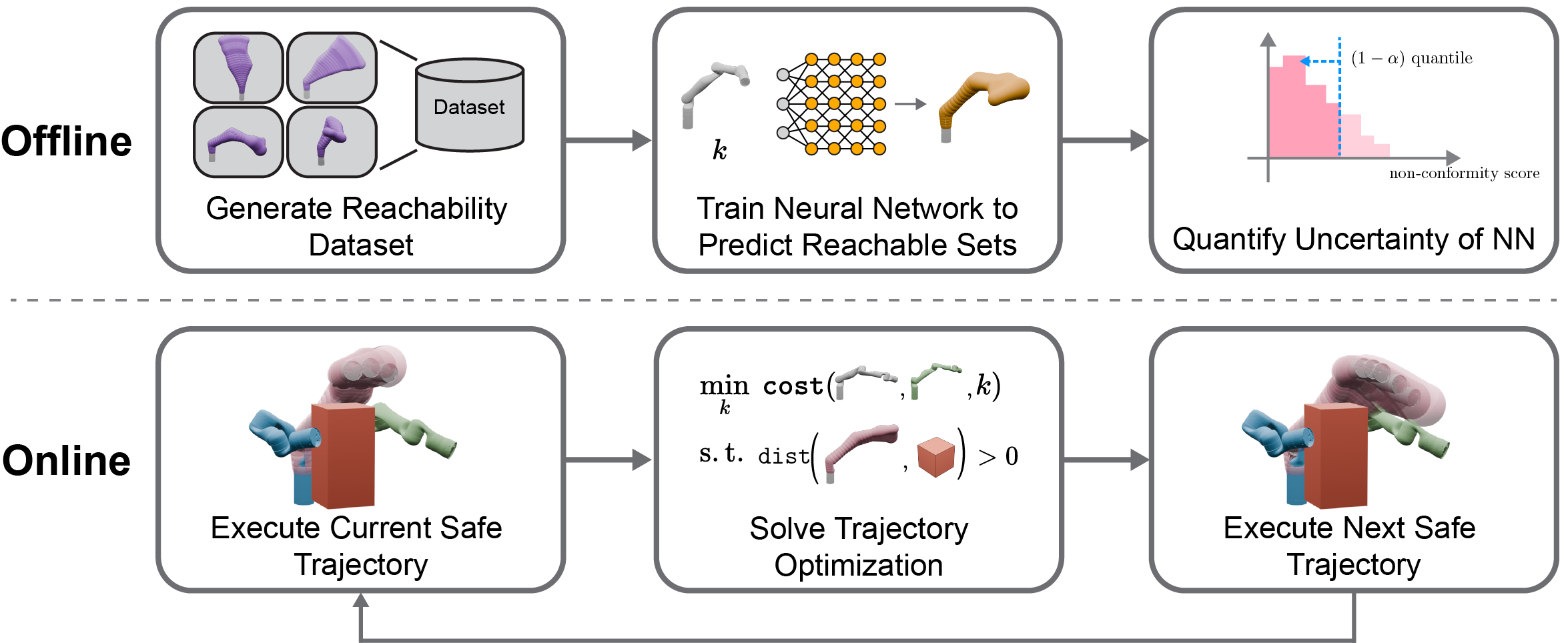
This paper proposes Conformalized Reachable Sets for Obstacle Avoidance With Spheres (CROWS), a neural network-based safety representation that can be efficiently integrated into a trajectory optimization algorithm. CROWS extends SPARROWS1 by learning an overapproximation of the swept volume (i.e. reachable set) of a serial robot manipulator that is composed entirely of spheres. Prior to planning, a neural network is trained to approximate the sphere-based reachable set. Then, CROWS applies conformal prediction to compute a confidence bound that provides a probabilistic safety guarantee. Finally, CROWS uses the conformalized reachable set and its learned gradient to solve an optimization problem to generate probabilistically-safe trajectories online.
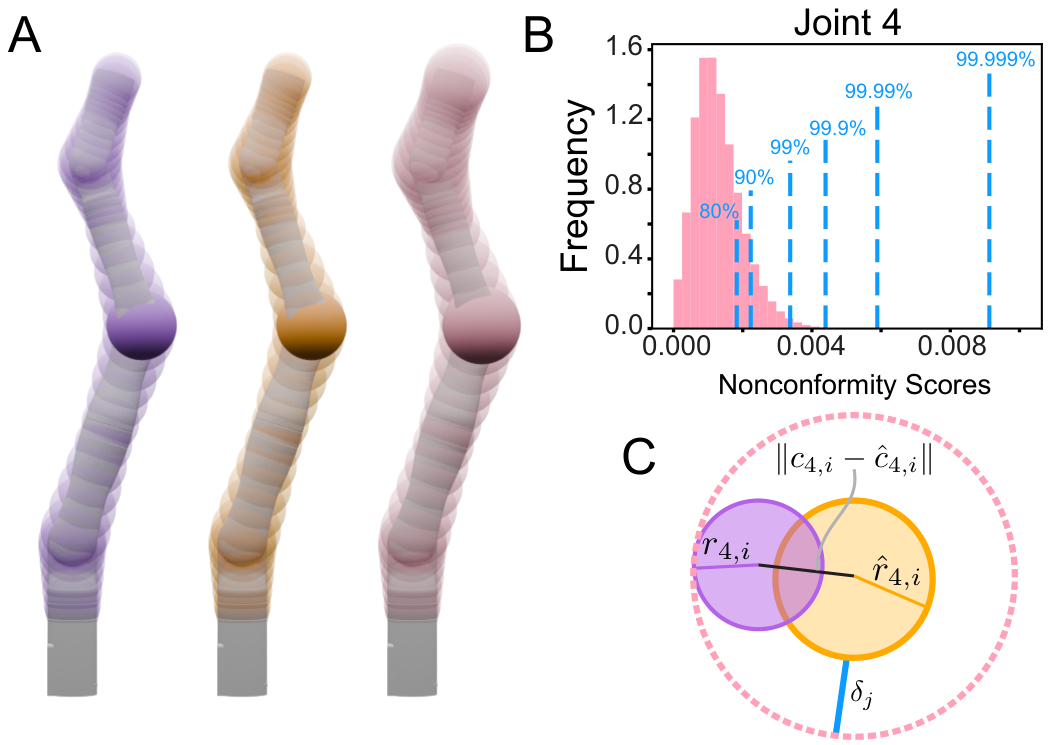
Panel (A) compares the ground truth (left, purple), predicted (middle, orange), and conformalized (right, pink) reachable sets. To construct the conformalized reachable set, CROWS first defines the nonconformity score, which is the minimum buffer (blue) to ensure that the predicted sphere (orange) encloses the ground truth sphere (purple) (Panel C). The distribution of the nonconformity scores for joint 4 over a time interval \(T_i\) with the values defining the quantiles indicated in blue (Panel B). Next, conformal prediction computes a confidence bound that upper bounds the nonconformity scores with a probability of \(1 − \epsilon\). The predicted joint sphere (A, middle) is then expanded by the size of this confidence bound to give the conformalized joint sphere (A, right). Finally, applying this procedure for all of the joint spheres gives the conformalized neural (A, right) reachable set that is guaranteed to cover the ground truth reachable set with probability greater than \((1 − \epsilon)^{n_q+1}\), where \(n_q\) is the number of actuated joints (Thm. 5).
Related Projects #
- Safe Planning for Articulated Robots Using Reachability-based Obstacle Avoidance With Spheres
- Let’s Make a Splan: Risk-Aware Trajectory Optimization in a Normalized Gaussian Splat
- Reachability-based Trajectory Design with Neural Implicit Safety Constraints
Citation #
This project was developed in Robotics and Optimization for Analysis of Human Motion (ROAHM) Lab at the University of Michigan - Ann Arbor.
@inproceedings{kwon2024crows,
title={Conformalized Reachable Sets for Obstacle Avoidance With Spheres},
author={Kwon, Yongseok and Michaux, Jonathan and Isaacson, Seth and Zhang, Bohao and Ejakov, Matthew and Skinner, Katherine A and Vasudevan, Ram},
booktitle={2025 IEEE International Conference on Robotics and Automation (ICRA)},
year={2025},
organization={IEEE}
}