Overview Videos
SPARROWS performing single arm planning
SPARROWS performing two arm planning
Abstract
Generating safe motion plans in real-time is necessary for the wide-scale deployment of robots in unstructured and human-centric environments. These motion plans must be safe to ensure humans are not harmed and nearby objects are not damaged. However, they must also be generated in realtime to ensure the robot can quickly adapt to changes in the environment. Many trajectory optimization methods introduce heuristics that trade-off safety and real-time performance, which can lead to potentially unsafe plans. This paper addresses this challenge by proposing Safe Planning for Articulated Robots Using Reachability-based Obstacle Avoidance With Spheres (SPARROWS). SPARROWS is a receding-horizon trajectory planner that utilizes the combination of a novel reachable set representation and an exact signed distance function to generate provably-safe motion plans. At runtime, SPARROWS uses parameterized trajectories to compute reachable sets composed entirely of spheres that overapproximate the swept volume of the robot’s motion. SPARROWS then performs trajectory optimization to select a safe trajectory that is guaranteed to be collision-free. We demonstrate that SPARROWS’ novel reachable set is significantly less conservative than previous approaches. We also demonstrate that SPARROWS outperforms a variety of state-of-the-art methods in solving challenging motion planning tasks in cluttered environments. Code is available on GitHub at roahmlab/sparrows.
Method
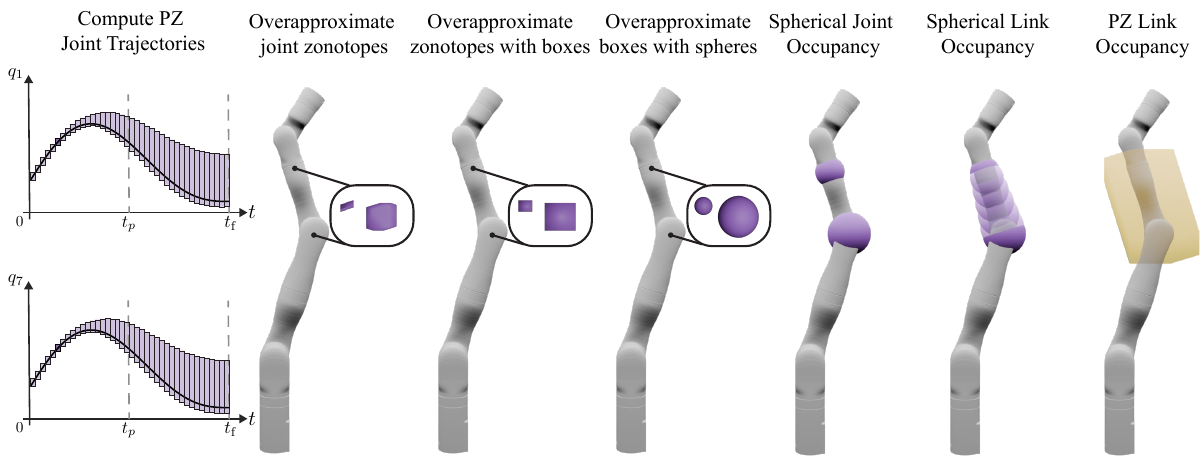
To address the limitations of existing approaches, this paper proposes Safe Planning for Articulated Robots Using Reachability-based Obstacle Avoidance With Spheres (SPARROWS). The proposed method combines reachability analysis with sphere-based collision primitives and an exact signed distance function to enable real-time motion planning that is certifiably-safe, yet less conservative than previous methods. This paper’s contributions are three-fold:
- A novel reachable set representation composed of overlapping spheres, called the Spherical Forward Occupancy (SFO), that overapproximates the robot’s reachable set and is differentiable;
- An algorithm that computes the exact signed distance between a point and a three-dimensional zonotope;
- A demonstration that SPARROWS outperforms similar state-of-the-art methods on a set of challenging motion planning tasks
Simulation Results
Random Scenarios
The following videos demonstrate the performance of SPARROWS to other methods in randomly generated hard scenarios. In each of these, SPARROWS is able to achieve the desired goal configuration, while the others aren’t. ARMTD does stop in a safe configuration, but it gets stuck and fails to make it to the goal. On the other hand, MPOT and TRAJOPT both stop due to colliding with the environment.
10 obstacles
20 obstacles
40 obstacles
Hard Scenarios
We also handcraft hard scenarios where the arm must go around large obstacles and maneuver through tight spaces. SPARROWS’ performance on a handful of these scenarios is demonstrated below.
Related Projects
- Let’s Make a Splan: Risk-Aware Trajectory Optimization in a Normalized Gaussian Splat
- Conformalized Reachable Sets for Obstacle Avoidance With Spheres
- Autonomous Robust Manipulation via Optimization with Uncertainty-aware Reachability
- Reachability-based Trajectory Design with Neural Implicit Safety Constraints
- Reachability-based Trajectory Design via Exact Formulation of Implicit Neural Signed Distance Functions
Citation
This project was developed in Robotics and Optimization for Analysis of Human Motion (ROAHM) Lab at the University of Michigan - Ann Arbor.
@INPROCEEDINGS{Michaux-SPARROWS-RSS-24,
AUTHOR = {Jonathan Michaux AND Adam Li AND Qingyi Chen AND Che Chen AND Ram Vasudevan},
TITLE = {{Safe Planning for Articulated Robots Using Reachability-based Obstacle Avoidance With Spheres}},
BOOKTITLE = {Proceedings of Robotics: Science and Systems},
YEAR = {2024},
ADDRESS = {Delft, Netherlands},
MONTH = {July},
DOI = {10.15607/RSS.2024.XX.035}
}