Abstract
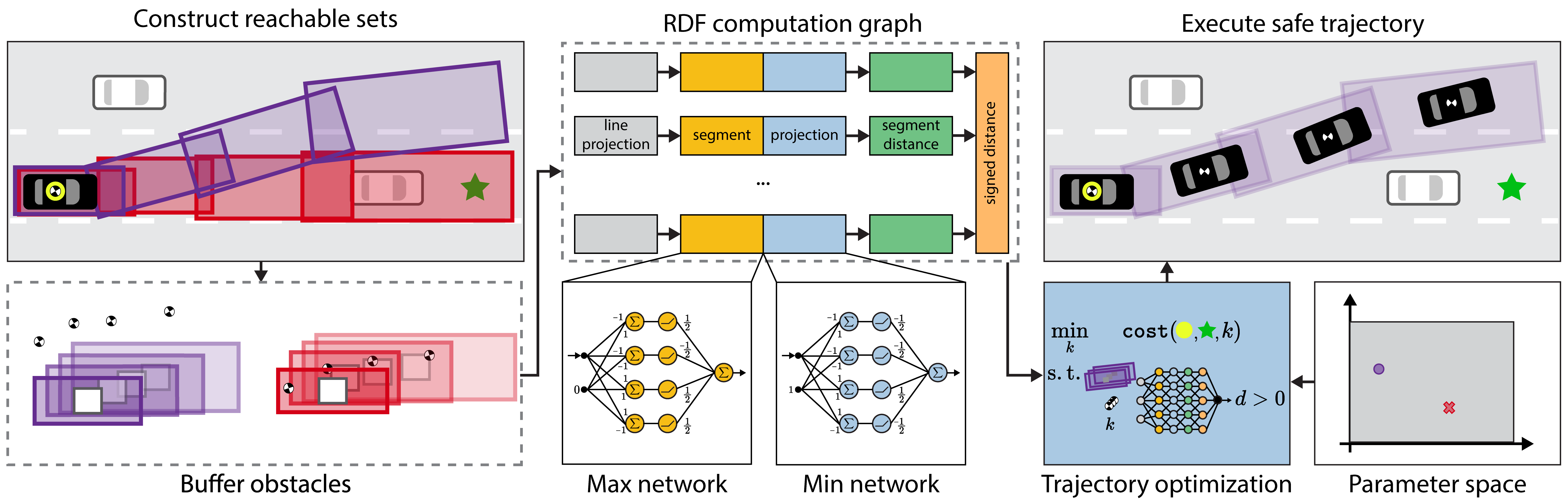
Generating receding-horizon motion trajectories for autonomous vehicles in real-time while also providing safety guarantees is challenging. This is because a future trajectory needs to be planned before the previously computed trajectory is completely executed. This becomes even more difficult if the trajectory is required to satisfy continuous- time collision-avoidance constraints while accounting for a large number of obstacles. To address these challenges, this paper proposes a novel real-time, receding-horizon motion planning algorithm named Reachability-based trajectory Design via Exact Formulation of Implicit NEural signed Distance functions (REDEFINED). REDEFINED first applies offline reachability analysis to compute zonotope-based reachable sets that overapproximate the motion of the ego vehicle. During online planning, REDEFINED leverages zonotope arithmetic to construct a neural implicit representation that computes the exact signed distance between a parameterized swept volume of the ego vehicle and obstacle vehicles. REDEFINED then implements a novel, real-time optimization framework that utilizes the neural network to construct a collision avoidance constraint. REDEFINED is compared to a variety of state-of-the-art techniques and is demonstrated to successfully enable the vehicle to safely navigate through complex environment. Code will be released upon acceptance of this manuscript.
Method
Simulation Results
The following videos demonstrate the performance of REDEFINED compared to REFINE under a time limit of 0.35s, 0.30s and 0.25s for each planning iteration. In all the shown cases REFINE is unable to find a feasible solution within the specified time limit so it stops, while REDEFINED is able to constantly find feasible solutions and finally reach the goals.
0.35s Time Limit
REDEFINED operating with 0.35s time limit
REFINE operating with 0.35s time limit
0.30s Time Limit
REDEFINED operating with 0.30s time limit
REFINE operating with 0.30s time limit
0.25s Time Limit
REDEFINED operating with 0.25s time limit
REFINE operating with 0.25s time limit
# Citation
This project was developed in Robotics and Optimization for Analysis of Human Motion (ROAHM) Lab at University of Michigan - Ann Arbor.
@misc{michaux2024redefined,
title={Reachability-based Trajectory Design via Exact Formulation of Implicit Neural Signed Distance Functions},
author={Jonathan Michaux and Qingyi Chen and Challen Enninful Adu and Jinsun Liu and Ram Vasudevan},
year={2024},
eprint={2403.12280},
archivePrefix={arXiv},
primaryClass={cs.RO}
}